Teleskopnachführung simulieren
Tabellenkalkulationen funktionieren auch bei Regen.
Was tut man nicht alles an einem langen und verregneten Wochenende, z.B. die Steuererklärung machen. Scherz beiseite, das Thema Nachführung und Guiding möchte ich endlich in den Griff bekommen, ohne dabei ewig auf eine sternklare Nacht zu warten. Wäre es nicht elegant, wenn man die Nachführparameter in einer Simulation testen und aufeinander abgleichen könnte, um dann später gleich mit dem Fotografieren loslegen zu können?
Die Idee
Eine mit Fehlern behaftete Nachführung könnte in einer Tabellenkalkulation nachgebildet werden. In einem weiteren Schritt könnten dann Nachführkorrekturen berechnet werden, so dass am Ende ein Guiding-Ergebnis steht, das hinsichtlich seines Restfehlers untersucht werden kann.
Nachführfehler
Nachdem die Basisparameter Schneckenzyklus, Belichtungszeit der Nachführkamera und Nachführ-geschwindigkeit festgelegt sind, werden zunächst die periodischen Fehler angebracht. Die 1. Ordnung stammt vom Schneckenrad selbst. Die nächsten bei-den, höheren Ordnungen stammen vom Getriebe zwischen Schneckenwelle und Motor. Amplitude, Periodendauer und Phase dieser regelmäßigen Störungen kann man z.B. mittels phdlogview an einer realen Montierung ermitteln.
Etwas schwieriger ist es das Seeing zu simulieren. Letztendlich wird eine inverse Normalverteilung dann mit dem Durchmesser des Seeing-Scheib-chens und dem Seeing-Index "gefüttert". Diese Parameter lassen sich z.B. unter meteoblue.com für jeden Beobachtungsort ablesen. Die Standard-abweichung wird zusätzlich mit der Belichtungs-dauer bewertet. Kurze Zeiten führen zu mehr Einfuss
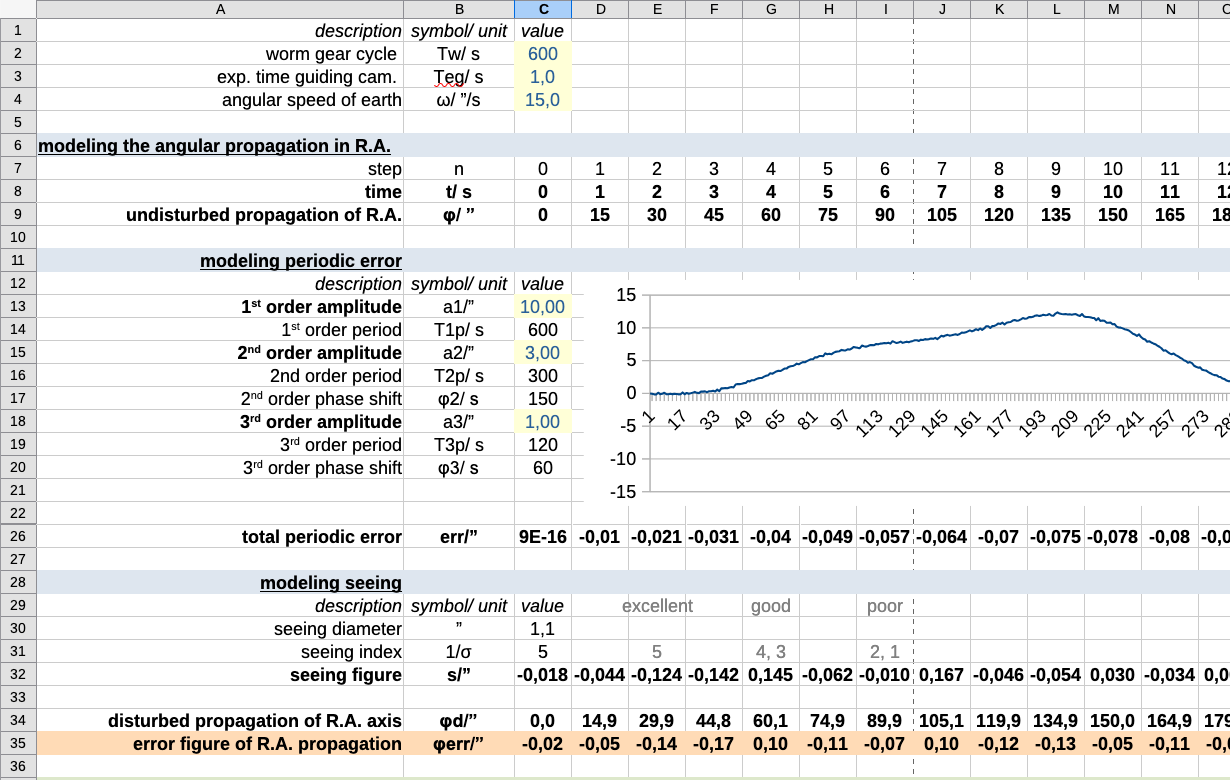
des Seeings auf den Gesamtfehler der Nachführung als lange Belichtungszeiten. Periodische Fehler und Seeing werden dann zu einem Gesamtfehler addiert (error figure of R.A. propagation). Bisher wurde noch darauf verzichtet, Störungen durch Wind oder mangelhafte Polausrichtung zu simulieren. Unmöglich ist das jedoch nicht.
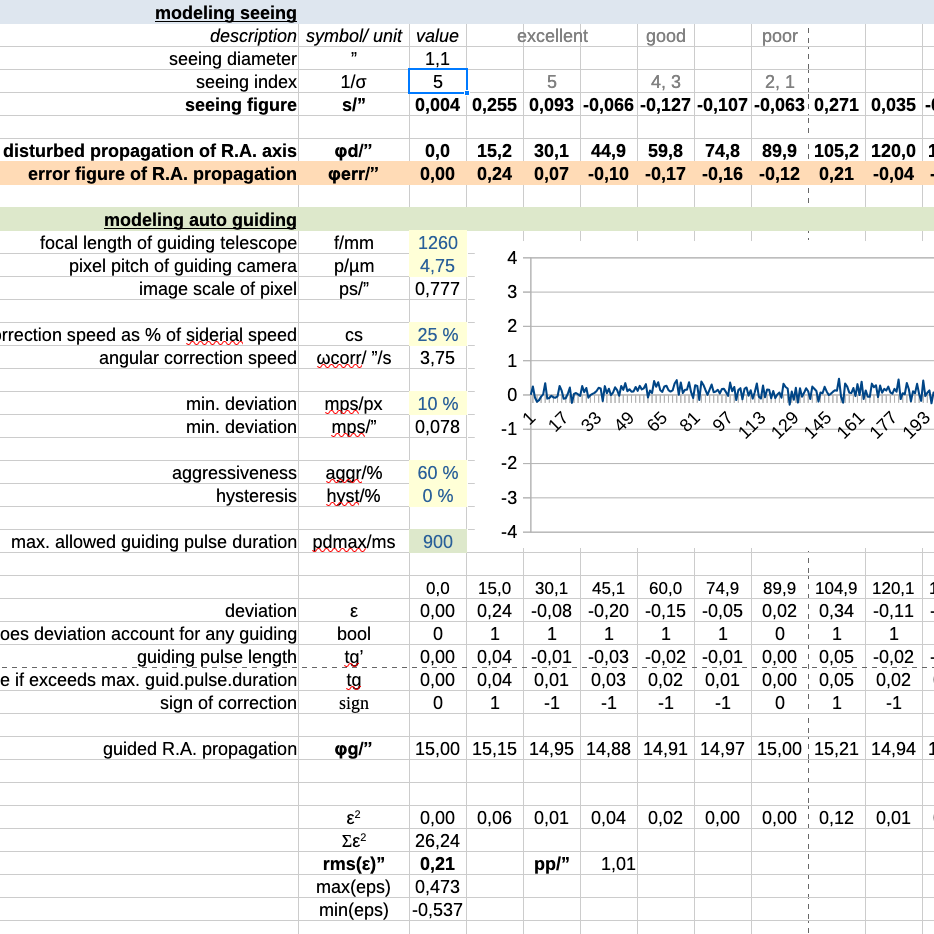
Nachführkorrektur (guiding)
Basisparameter der Nachführung sind Nachführ-brennweite, pixel pitch des Nachführsensors und die Korrekturgeschwindigkeit als Anteil der Nachführge-schwindigleit.
Viele Nachführlösungen erlauben das sog. sub-pixel-guiding. Dabei wird nicht ein ganzes Pixel als Maß für die Nachführgenauigkeit herangezogen, sondern lediglich der Bruchteil eines Pixel.
PHD2 und auch der MGEN2 erlauben es die aggressiveness einzustellen. (Bei mir persönlich wird die immer größer.) Mit aggressiveness wird festgelegt, welcher Anteil eines berechneten Korrekturimpulses tatsächlich an die Nachführung weitergegeben wird.
Hysteresis kennt nur PHD2. Bei der Simulation des MGEN2 stellt man diesen Parameter auf Null. Mit hysteresis wird festgelegt welcher Anteil der vorhergehenden zum aktuell berechneten Korrektur-impuls hinzuaddiert werden soll. Das ist insbesondere in den Umkehrpunkten der Fehlerkurve von Bedeutung.

Die maximal erlaubte Korrekturimpulsdauer ist ein letzter Parameter. In der Praxis wählt man dafür 90% der Belichtungszeit der Nachführkamera. In PHD2 muss man diesen Wert jeweils festlegen, obwohl er sich so einfach aus der Belichtungszeit errechnen ließe. Vielleicht habe ich aber auch einfach nicht verstanden, warum ein Korrekturimpuls länger andauern sollte als ein Messintervall. Der Restfehler ε in einer Grafik über der Zeit aufgetragen. Als Ergebnisparameter werden RMS(ε)/" und εpp/" berechnet, um die Qualität des (simulierten) guiding überprüfen zu können.
Die nachfolgende Bilderreihe zeigt einige erste Ergebnisse mit dem so aufgebauten Simulator.



Ein wichtiger Anfang ist gemacht. Wer möchte, kann sich die Tabellenkalku-lation gerne herunterladen und selbst damit experimentieren. Fundierten Verbesserungsvorschlägen stehe ich offen gegenüber.