Astronomie ohne Beobachtung - Training the PEC
Von Kabelsalat, nur für Windows und USB-Treibern
Nachdem es gestern um das eher theoretische Thema "Regelkreis im Autoguiding" gegangen ist, möchte ich mich heute der praxisnahen Beseitigung einer regelmäßigen Störung von astronomischen Montierungen widmen. Der periodische Fehler (periodic error, PE) des Antriebsstrangs einer astronomischen Montierung wird im Wesentlichen durch unvermeidbare Fertigungstoleranzen des Schneckengetriebes hervorgerufen. Der PE ist jedoch zyklisch wiederkehrend, messbar und kann durch "elektronische" Gegenmaßnahmen deutlich reduziert werden.
Die eingebaute Lösung
In modernen Montierungen wird heutzutage die Behebung des PE nahezu immer schon ab Werk mitgeliefert. In den Handcontrollern der Mon-tierungssteuerungen existiert dazu der Menüpunkt "PEC" (periodic error correction).
In einem ersten Schritt muss die PEC trainiert werden. Dazu beobachtet man einen Leitstern im Fadenkreuzokular. Wandert der Stern in R.A. aus, dann korrigiert man mit den Steuertasten des Handcontrollers. Diese Korrekturen werden vom Handcontroller für die Dauer eines Schneckenumlaufes aufgezeichnet.
Später werden die aufgezeichneten Korrekturen dann einfach nur noch abgespielt (playback) und steuern so dem PE des Schneckengetriebes entgegen. So konnte z.B. der periodische Fehler meiner Celestron AVX schon von 32" auf 12" reduziert werden.
Den Vorgang der Nachführkontrolle wie in alten Zeiten ist jedoch eher lästig und möglicherweise nicht so exakt, wie ich es mir wünsche.
Könnte das nicht ein Autoguider viel besser, mit höherer Genauigkeit und Präzision, leisten?

Autoguiding
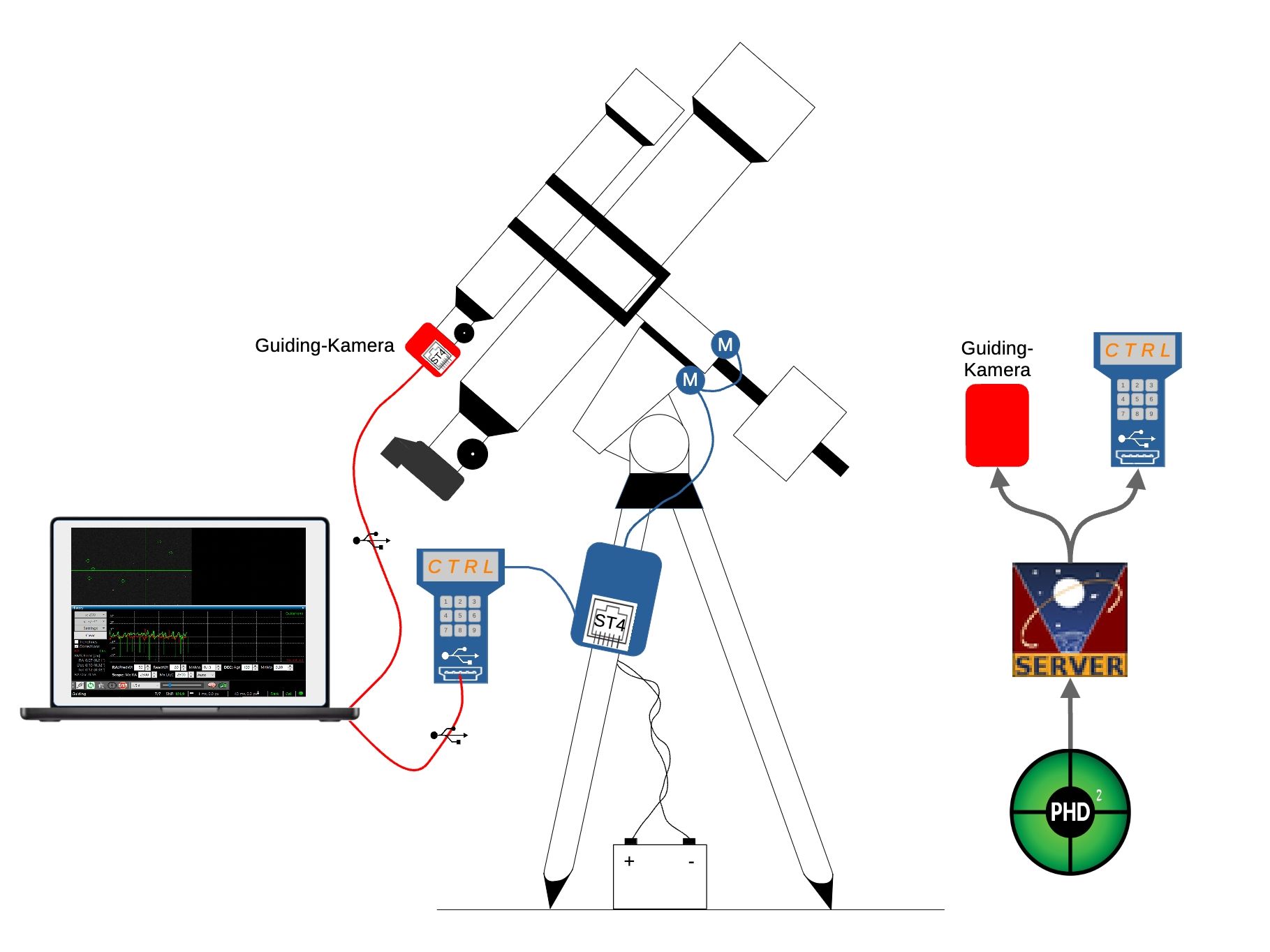
Ob Standalone-Autoguider oder Autoguiding mit PHD2, das Prinzip ist immer gleich. Eine Guiding-Kamera nimmt durch ein Leitfernrohr Abweichungen des Leitsterns von der Sollposition auf und gibt diese an einen Computer weiter. Dieser berechnet Korrekturimpulse, die über den ST4-Port an die Montierungs-steuerung weitergegeben werden. Es könnte nun so einfach sein ...


Leider zeichnen die eingebauten PEC-Funktionen der Handcontroller von Celestron und SkyWatcher keine Impulse auf, die über den ST4-Port in die Montierungs-steuerungen gelangen.
Sowohl Celestron als auch SkyWatcher bieten deshalb Sw-Tools an, mit deren Hilfe eine Aufzeichnung des PE sogar über mehrere Perioden möglich ist und die das Ergebnis der PEC später auf die jeweiligen Handcontroller übertragen können. Leider gibt es diese Software derzeit (2026!) nur für Windows. Mit einem Mac muss man andere Wege gehen...
Auf einem Mac installiert man zunächst einen INDI-Server (z.B. INDIstarter) und die entsprechenden USB-Treiber für Guiding-Kamera und Handcontroller.
Die Konfiguration der Prolifc-Treiber für meine beiden Handcontroller war nicht gerade einfach. Zumindest weiß ich jetzt, wo ich auf dem Apfel die Entwicklerrechte einstelle...
Mit PHD2 und anderen Software-Tools kann man über den INDI-Server nun gleichzeitig auf die Guiding-Kameras(!) und die Handcontroller(!) gleichzeitig zugreifen. Ja, plural! Ich habe hier im Wohnzimmer mit einem Mac an zwei Teleskopen gleichzeitig gedreht!
Aber zurück zur PEC. PHD2 verfügt zwar über eine PPEC (permanent PEC). Diese PPEC kann jedoch nicht auf die Montierungssteuerung übertragen werden. Man benötigt also immer einen PC bzw. einen Mac.
Eine PEC-Sw die zumindest mit meiner Celestron AVX kompatibel ist und später die Übertragung der PEC-Datei auf den Handcontroller erlaubt, ist Open PECTool. Für die SkyWatcher EQM35Pro habe ich leider noch nichts gefunden.
Nur jetzt kommt's: PHD2 und Open PECTool können nicht gleichzeitig auf einen Celestron-Handcontroller zugreifen, auch nicht über einen INDI-Server! Mist!
So könnte es endlich funktionieren
Scheinbar kann das Open PECTool über den Handcontroller die ST4-Steuer-signale auslesen. Der PEC-Trainer des Handcontroller konnte das ja nicht (s.o.). Eine entsprechende Beschreibung gibt es z.B. hier.
Also neues Setup: PHD2 übernimmt das Autoguiding und liefert Korrekturpulse an den ST4-Port der Montierungssteuerung. Über den Handcontroller liest Open PECTool die ST4-Pulse aus der Montierung aus. Anschließend werden diese Messwerte geglättet und können dann als permanente PEC wieder an den Handcontroller übertragen werden.
Handcontroller und Guiding-Kamera können entweder jeweils direkt oder über den INDI-Server angesteuert werden.
Das wäre der Plan für die nächste klare Nacht mit der Celestron AVX.
Bleibt nur noch übrig, eine entsprechend geeignete Lösung für die EQM35Pro zu finden. Kommt Zeit, kommt Software.
